
Register Any Point: Scaling 3D Point Cloud Registration by Flow Matching
Paper • 2512.01850 • Published
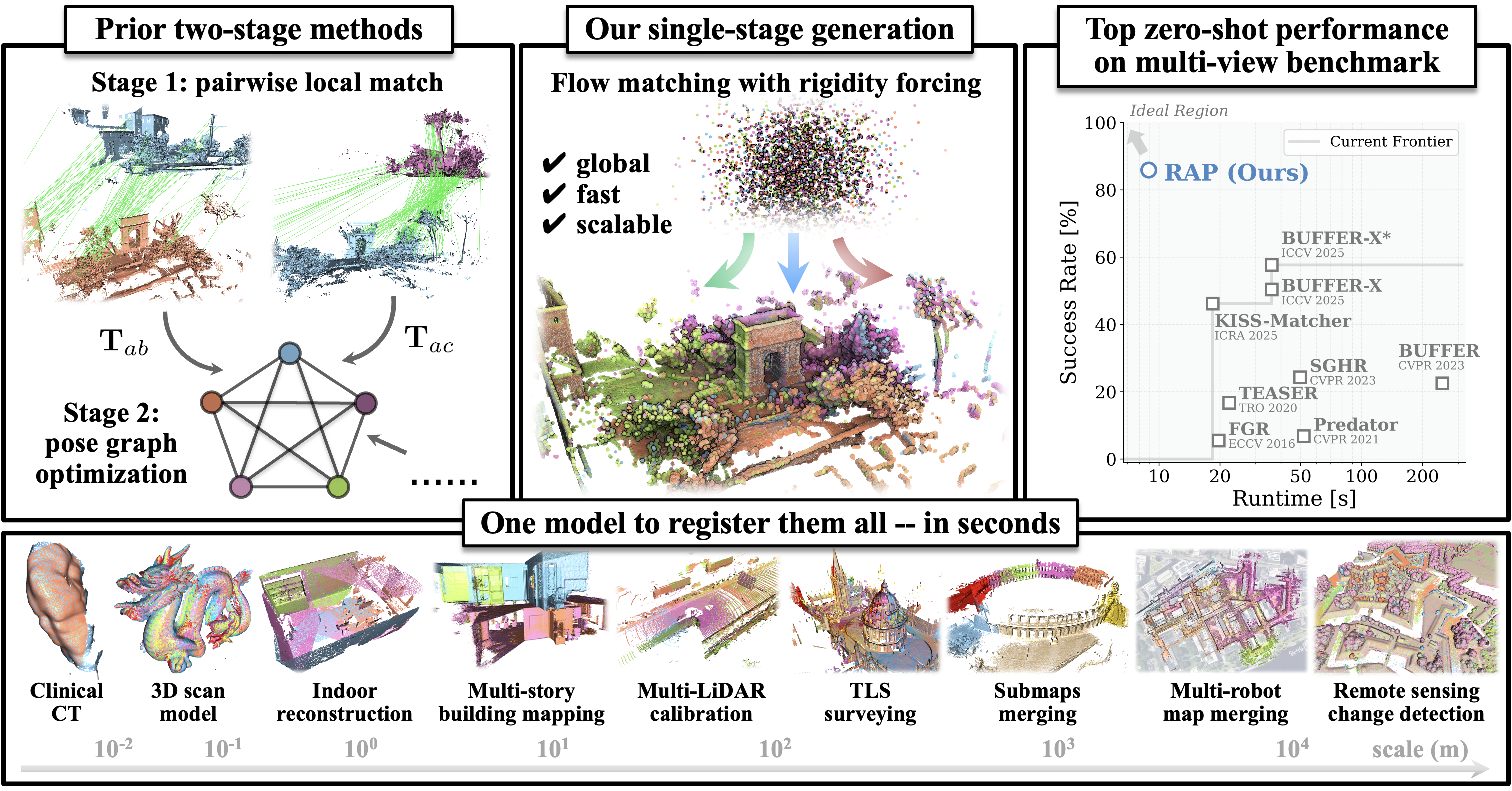
Register Any Point (RAP) is a single-stage multi-view point cloud registration model based on conditional flow matching generation in the Euclidean space. RAP model generalises to point clouds with diverse scales, sensors, view counts, and overlapping ratios.
Point cloud registration aligns multiple unposed point clouds into a common reference frame and is a core step for 3D reconstruction and robot localization. RAP casts registration as conditional generation: a learned, continuous point-wise velocity field transports noisy points to a registered scene, from which the pose of each view is recovered.
Unlike prior methods that perform correspondence matching to estimate pairwise transformations and then optimize a pose graph for multi-view registration, RAP directly generates the registered point cloud, yielding both efficiency and point-level global consistency.
For details on installation and running inference, please check the official GitHub repository.
If you use RAP in your research, please cite:
@article{pan2025arxiv,
title = {{Register Any Point: Scaling 3D Point Cloud Registration by Flow Matching}},
author = {Pan, Yue and Sun, Tao and Zhu, Liyuan and Nunes, Lucas and Armeni, Iro and Behley, Jens and Stachniss, Cyrill},
journal = {arXiv preprint arXiv:2512.01850},
year = {2025}
}